技術交流
1、什麽(me)是機器人示(shi)教器
示教器是進(jìn)行機器人的(de)手動操縱、程(chéng)序編寫、參數(shù)配置以及監(jiān)控用的手持(chí)裝置。

上圖是ABB機器(qì)人示教器,其(qí)中A是示教器(qì)與控制櫃之(zhī)間的連接電(diàn)纜,B是觸摸屏(ping),C是急停開關(guān),D是手動操縱(zong)杆,E是數據備(bèi)份與恢複用(yòng)USB接口(可(kě)插U盤/移動硬(ying)盤等存儲設(she)備),F是使能按(an)鈕。
2、使能按鈕
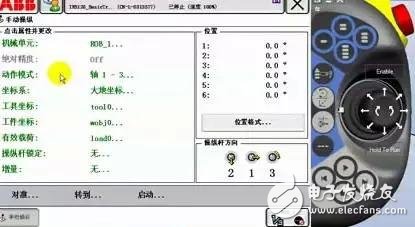
點擊“動作(zuo)模式”。
在動作模式(shì)中,ABB機器人一(yi)共有三種操(cao)作模式。分别(bie)爲“單軸運動(dong)”、“線性運動”、“重(zhòng)定位運動”。
4、單軸(zhóu)運動
動作模式中(zhong),選擇軸1-3。按下(xia)使能器到第(dì)一檔,手動操(cao)縱杆左右方(fāng)向可以控制(zhi)Axis1運動,上下方(fāng)向控制Axis2運動(dòng),旋轉操縱杆(gǎn)控制Axis3運動。
動作模(mó)式中,選擇軸(zhou)4-6。按下使能器(qì)到第一檔,手(shou)動操縱杆左(zuǒ)右方向可以(yǐ)控制Axis4運動,上(shang)下方向控制(zhi)Axis5運動,旋轉操(cāo)縱杆控制Axis6運(yun)動。
5、操縱杆使用(yòng)技巧
我們可以将(jiāng)ABB機器人的操(cao)縱杆比作汽(qi)車的油門,操(cao)縱杆的扳動(dong)或旋轉的幅(fú)度與機器人(ren)速度相關。
(2)扳(bān)動或旋轉的(de)幅度大則機(ji)器人運行速(su)度較塊。
特别提醒(xing):在手動操作(zuò)機器人時,盡(jin)量小幅度操(cāo)縱操縱杆,使(shǐ)機器人在慢(màn)速狀态下運(yun)行 可控性較高(gāo)。